清华大学与星动纪元联合推出革命性开源机器人模型VPP,助推机器人从虚拟到现实的跨越式发展
时间:2025-05-20 11:25
小编:小世评选
近期,清华大学交叉信息研究所的ISRLab与人工智能领域先锋企业星动纪元联合推出了一款具有划时代意义的开源人工智能生成式机器人大模型——VPP(Video Prediction Policy),相信这款被誉为机器人界的"Sora"的模型,将为机器人技术的进步注入强大动力。VPP模型的设计目的是为了实现虚拟世界和现实世界之间的无缝转变,进而推动机器人在各个领域的应用。
这一创新的背后,得益于星动纪元在机器人技术的深入探索,特别是其自主研发的全球首创关节全直驱仿人五指灵巧手——星动XHAND1,这一不仅为VPP模型的训练与验证提供了强有力的硬件支持,也为机器人的应用扩展奠定了坚实基础。
星动XHAND1的独特优势
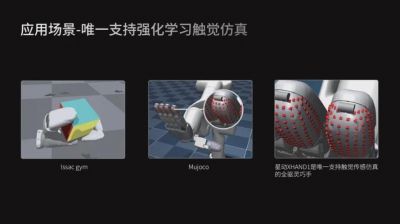
星动XHAND1作为一款高性能的灵巧手,它的设计理念在于充分的自由度和灵活性,使其在VPP模型的训练和应用上表现出独特的优势。在对速度反应的极致追求下,XHAND1能够实现单指10次点击/秒的反应速度,足以媲美职业电竞选手的操作灵活性。这种快速的响应能力不仅提高了机器人的操作效率,也为VPP模型的训练提供了充足的硬件支持,使得机器人能够以更精准的方式完成复杂任务,包括抓取、放置、堆叠、倒水等。
XHAND1全直驱的驱动设计使其在执行任务时,能够提供更大的力量输出。这种设计特别适合需要高负荷和强握力的操控任务,使得VPP模型在面对重物或复杂操作时依然能够稳定执行,确保了模型的高效验证和可靠性。
文化和技术的结合
在VPP模型的训练过程中,反驱特性为XHAND1带来了更丰富的训练场景。这一特性不仅提高了机器人的容错能力,还深化了人机协作过程中的动态反馈。与人类共同完成任务时,XHAND1可以根据人类施加的力量实时调整其动作,从而实现更自然、更流畅的人机交互。这种相互适应的特性有效提升了VPP模型的泛化能力,使其能够在不确定的实际应用中表现出更强的适应性。
星动XHAND1还配备了高功率密度的空心杯电机和高精度编码器,确保在执行复杂任务时具备出色的动力输出和控制精度。其耐久性也得到了市场的广泛认可,长期使用后,星动XHAND1在高负荷和长时间操作下依然能保持卓越的性能,在VPP模型的验证过程中为训练数据的可靠性提供了保障。
未来的发展潜力
星动XHAND1能够实时捕捉和传输人类的操作动作,为VPP模型提供了丰富而真实的动作数据。这些数据不仅包括基本的操作流程,还结合了视觉设备如Apple Vision Pro所捕捉的多维度场景信息。这些前沿技术的融合,使得VPP模型能够不断地学习从人类操作中提取的策略,从而提升其操作的准确性和适应性,有助于实现更多复杂的操作任务。
XHAND1支持多设备协同工作,能够构建出更加真实和复杂的操作环境。这为VPP模型的多任务学习和泛化能力的提升创造了条件,不仅能够加速数据采集和模型训练,还能为未来的应用场景提供强大的支持。这一切都表明,VPP机器人大模型在各种实际应用场景中实现高效、精准操作的前景广阔。
星动XHAND1通过其高度解耦的关节设计,让AI算法开发者获得了真正的自由,提升了VPP模型对灵巧手的控制能力。凭借卓越的力控技术、超高的触觉反馈以及广泛的应用可适配性,星动XHAND1不仅成为了VPP模型的理想训练,更是未来机器人技术发展的助推器。
随着VPP模型的不断优化和完善,结合VLA(视觉、语言和动作)与AIGC(人工智能生成内容)技术的融合创新,预示着星动纪元和清华大学将继续拓展机器人技术的应用边界,推动人形机器人技术的快速发展。我们期待在未来,随着这一新兴技术的推广,可以见证机器人在我们的生活和工作中发挥越来越重要的作用,真正实现从虚拟到现实的跨越式发展。
